Model
Reservoir/
Component
Water Balance or State Equations
Constitutive Relations
State Variables
Model Fluxes
Model Parameters
HyMod
Soil Moisture (Sm)
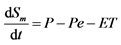
Sm is the soil moisture in the upper soil layer [mm].
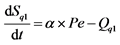
Sq1 is the total water content in tank 1 [mm].
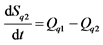
Sq2 is the total water content in tank 2 [mm].
Sq3 is the total water content in tank 3 [mm].
Ss is the total water content in the lower soil layer [mm].
Sm = 0; at t = 0 is the initial basin storage [mm].
Sq = 0; at t = 0 is the initial storage of quick-flow tanks [mm].
Ss = 0; at t = 0 is the initial storage of slow = flow tanks [mm].
P is the Precipitation [mm∙d−1].
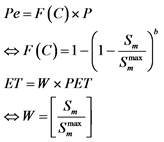
Pe is the effective Precipitation [mm∙d−1].
ET is the Evapo-transpiration from the soil [mm∙d−1].
PET is the Potential Evapotranspiration [mm∙d−1].
Qqi is the quick surface runoff in Sqi [mm∙d−1].
QS is the slow groundwater runoff in Ss [mm∙d−1].
 is the maximum storage capacity in the basin [5 - 600 mm].
is the maximum storage capacity in the basin [5 - 600 mm].
b is the shape parameter of the distribution of storage capacities within the basin [0.05 - 1.95].
α is the routing ratio quick to slow pathway [0.01 - 1].
Kq is the conductivity of the quick-flow routing tanks [0.001 - 0.1 day−1].
Ks is the conductivity of the slow-routing tanks [0.001-0.95 day−1]
Nq is the number of quick flow linear tanks [1] - [5] . In this description Nq = 3.
Quick Routing Reservoir 1 (Sq1)

Quick Routing Reservoir 2 (Sq2)

Quick Routing Reservoir 3 (Sq3)

Slow Routing
Reservoir (SS)

ARX
Autoregressive Component
 is streamflow forecast in time t + 1 [m3∙s−1].
is streamflow forecast in time t + 1 [m3∙s−1].
 is streamflow observed in time t − i [m3∙s−1].
is streamflow observed in time t − i [m3∙s−1].
 is rainfall observed in time t − j [mm].
is rainfall observed in time t − j [mm].
 is the error for the streamflow forecast in time t + 1
is the error for the streamflow forecast in time t + 1
α is a parameter calculated from the autoregressive component applied to streamflow.
β is a parameter calculated from the autoregressive component applied to rainfall.
na is the lag number for streamflow.
nb is the lag number for rainfall.
DKF
Discrete
Kalman Filter Component


 is a vector containing the present streamflow (not observed).
is a vector containing the present streamflow (not observed).
 is a vector containing the streamflow in the time k.
is a vector containing the streamflow in the time k.
 is a vector containing the rainfall in the time k.
is a vector containing the rainfall in the time k.
 and
and  are vectors containing the Gaussian noise for the process and measurements.
are vectors containing the Gaussian noise for the process and measurements.  and
and 
 is a vector containing the streamflow measurement.
is a vector containing the streamflow measurement.
A and B are matrices containing α and β parameters from the series of streamflow and rainfall data in the ARX model.
H is a transformed matrix that contains the states of the measurements.
Q and R are matrices containing the covariance for the noise in the process and the measurements.